Vi har for nyligt færdiggjort vores Payload Preliminary Design Report (PDR), som er en rapport hvor vi kan gøre status på de tidlige designvalg. Mere detaljerede designvalg vil komme, når vi nu går ind i den detaljerede design fase.Følgende er et lille udkast af nogle af de punkter som bliver gennemgået.
Rapporten er delt op i, Arkitekturen, som fortæller om hvilket udgangspunkt vi har designet og bygget videre ud fra. Strukturen som sætter de forskellige dele af projektet i kasser og fortæller om, hvordan de forskellige dele klarer sig. Her ses der blandt andet på test af systemer. Mere detaljeret bliver det, når vi dykker ned i de forskellige dele af projektet og ser på komponenterne der er indblandet. Det er i Modul sektionen, at der bliver set på det. I Preliminary Budget redegøres der for hvilke valg vi har taget, for at vægten skal være lav, og at systemet ikke bruger for meget energi.
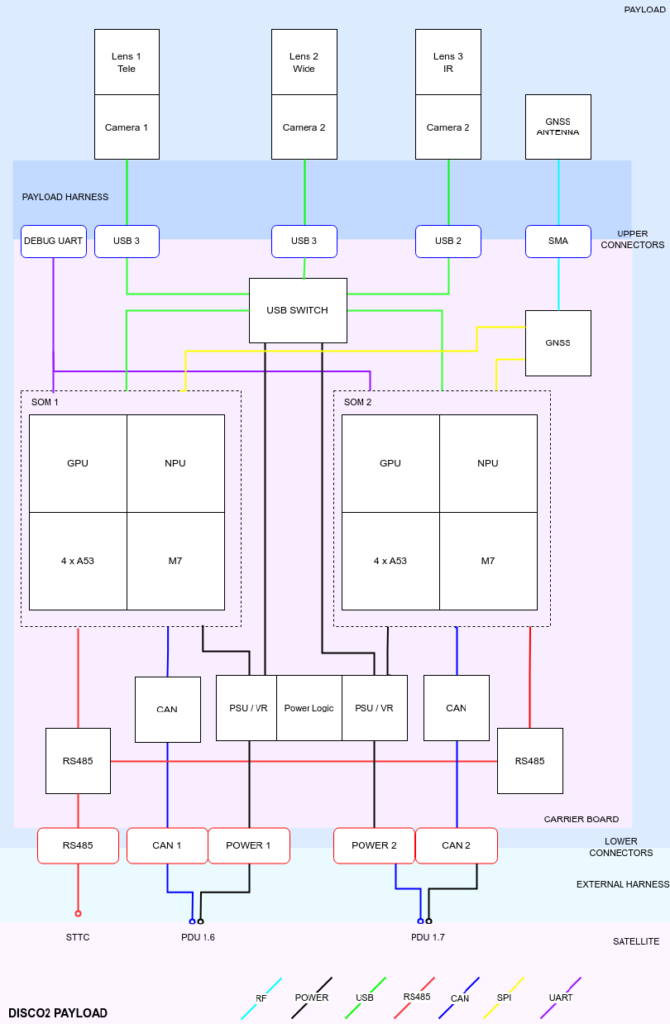
Der er blevet lavet et valg om at gentage succesen med SOM, System On Modules, som blev brugt i DISCO 1. Det er modulerne heri som skal sørge for at kontrollere kameraerne. Test, at de er kendte typer af produkter, samt at de blev brugt i DISCO 1 var grunden til, at de skulle med igen på DISCO 2.
Et diagram af hvordan DISCO 2’s payload ser ud kan findes herunder.
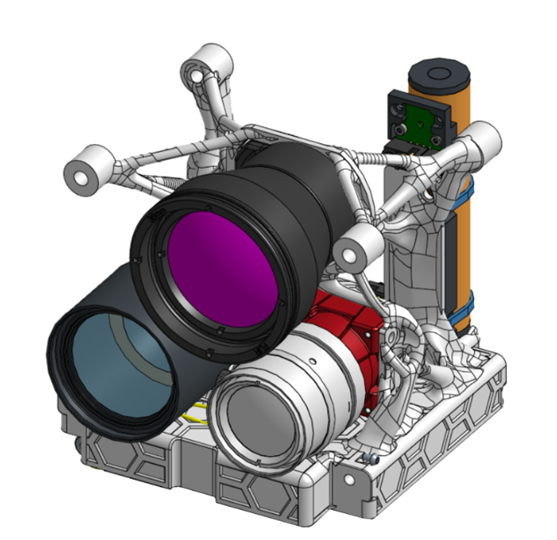
Test er nødvendigt, hvis man ønsker, at hvad man sender ud i rummet, skal fungere. Payload strukturen, som vist på billedet, er blevet testet på forskellig vis ud fra 3D modelsimulering. En af de, test der er foretaget er en “Gravitational Analysis”. Vores mål for modellen er at unit gravitational load ligger på 8.575N i alle akser, imens simuleringerne viser en load på 8.526N.
På DISCO to kommer der til at være 3 forskellige kameraer, som skal sørge for at opnå forskellige forskningsmæssige mål. Nogle af de mål for satellitten er:
- Fotogrammetri af gletsjere
- Position Afbildning til kystlinje og feature opsporing i stor skala
- Vejr og skydække i stor skala
- Videnskabsformidling og billedtagnings understøttelse for videnskabentlige missioner
Hvor det første kamera skal stå for at modellerer gletsjerne i 3D ud fra en masse 2D billeder. Det er det kamera som kommer til at have den laveste field of view, altså området som kommer på billedet.
Det andet kamera skal stå for at kunne modellerer store ting. Det er f.eks noget som kystlinjer, som kameraet vil kunne positionere. Kameraets field of view, er derfor noget større end hvad der er brug for på første kamera.
Det sidste kamera er det infrarøde kamera. Kameraet skal arbejde sammen med det første kamera, men det infrarøde kamera skal stå for at måle vandtemperaturen i havene.
Et par nøgleværdier at tage med fra kameraerne er. Et andet nøgleord at kende er Ground Sampling Distance(GSD), som beskriver hvor stor et område en pixel dækker. Jo større GSD, jo mindre præcision på kort afstand.
Kamera 1:
FOV: Kameraets billeder dækker et område på 61km
GSD: Kameraets billeder opfanger en pixel pr. 22m
Kamera 2:
FOV: Kameraets billeder dækker et område på 584km
GSD: Kameraets billeder opfanger en pixel pr. 237m
Kamera 3:
FOV: Kameraets billeder dækker et område på 117km
GSD: Kameraets billeder opfanger en pixel pr. 183m
Fra viden om kamera over til massebudget, så har vi arbejdet med viden i baghovedet om, at vi er begrænsede indenfor vægt og energi.
Med budgettet i mente så har vi formået at denne del af satellitten kommer til at veje 0,77283kg og dens gennemsnitlige effekt på 0,8991 watt.
Vi har fået lavet rapporten, som skal give en forståelse for teamet, med hvor langt vi er nået. Det hele er lagt ned på skrift og vi er et skridt tættere på det endelige produkt. En efterfølger kommer, når vi nu går ind i den mere detaljerede design fase.